
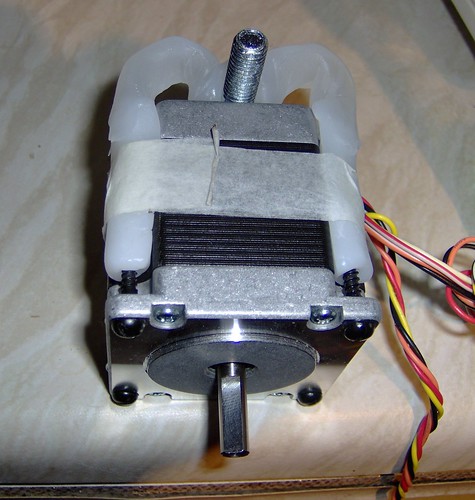
The 'legs' arch up before going to the 'body' to give some elasticity, so that when the screws are tightened the rod is held very firmly against the motor.
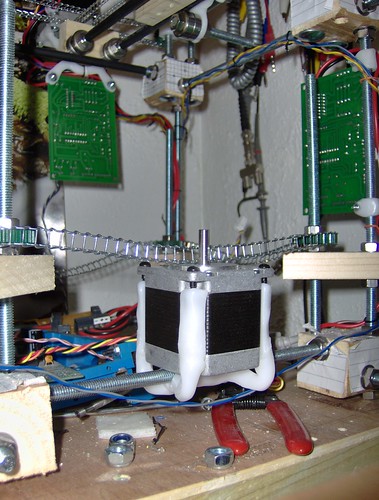
Here it is fitted to the machine. It gives a very firm grip, however it can be twisted fairly easily around the axis, but is firm enough to keep it in place. The only forces that will be applied to the motor when in operation are a liner force along the length of the chain, and a rotary force around the motor spindle, so no force should be present in the one direction that the motor can twist.
I've just put a load of closeup pictures of the machine onto my flickr page.
Unfortunately I've just broken my extruder, but more about that next.
No comments:
Post a Comment