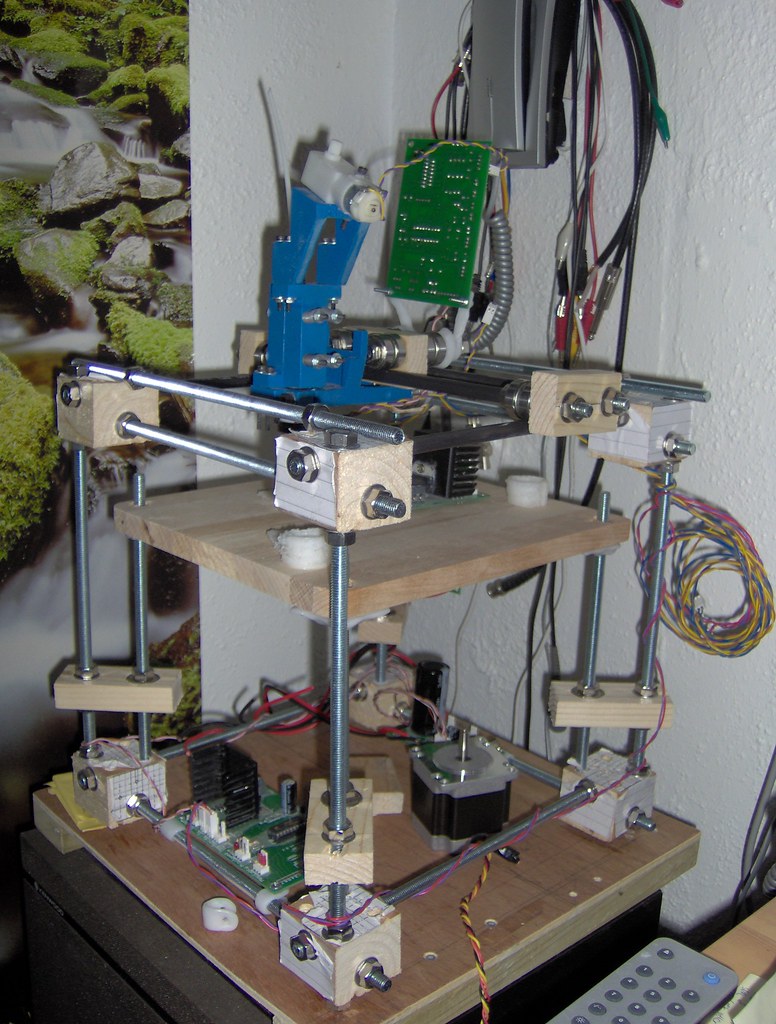
I've made a bit more progress with my mini Darwin. I now have an X axis with the extruder mounted on it, as well as a more or less complete Z axis. When pushing the extruder around it moves very smoothly, and with very little force so I'm hoping to get some pretty decent print speeds and much better quality than my Lego RepStrap. My idea with this RepStrap is to put in the least amount of required effort to get the thing of the ground, I'm not really designing the thing to last. Then once it is printing I can replace the lower quality pieces with new printed parts!
A quick note about drills
I did not use a pillar drill for my corner blocks, I just used an electric hand drill and a set square. The holes are more or less straight but the imperfections have caused me a lot of problems. My machine is actually a parallelogram rather than a square, but as long the the axis slide rods are parallel then this does not matter too much. I would advise anyone without a pillar drill to try and find one they can use, as the time you spend finding one will be much less that the amount of time you will spend trying the get everything straight afterwards!

I had not realised how much the extruder would overhang on the X axis, so my idea of having a X carriage just using skate bearings on top was not going to work. A bit of CAPA moulding later and I had a nice part that holds a third bearing underneath the carriage, rolling along the underside of the steel rod. The piece was bent a little before it set so that it is sprung firmly against the rod (CAPA is very 'springy') keeping the X carriage very firmly against the rod.

I made these CAPA brackets to hold the nuts and used just two screws in each of them to allow a little play, but only when tensioned against the twisting of the CAPA.

Building a jig first makes making parts from CAPA much easier. These are bearing blocks for the Y axis using 608 skate bearings. They may not look precise, but the three holes are, and that is all that matters :)
Now I'm just waiting for my gears and chain to arrive, but in the meantime I can still make my X, Y & Z motor mounts. Time for some more CAPA I think.










